
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
China's Space Program News Thread
- Thread starter crazyinsane105
- Start date
- Status
- Not open for further replies.





Comparison of Tianzhou-2 and Tianzhou-3. The green star points to a hinge like device at 0 degree. All direction is clockwise.
Tianzhou-2:

Tianzhou-3:

Regarding the attachment port, I suspect that it is a modification. Tianzhou-2's port is at an angle in between Tianzhou-2 and the node module (节点舱). It is difficult to maneuver the robotic arm's attaching head to reach the port. So Tianzhou-3 tilts the port to radial direction.
Tianzhou-2:
- There is a big round plate on top of a cylindrical structure right next to the green marker.
- Further next is the attaching port for robotic arm.
Tianzhou-3:
- The plate is gone.
- In the place of robotic arm attachment port, it is a cuboid structure.
Regarding the attachment port, I suspect that it is a modification. Tianzhou-2's port is at an angle in between Tianzhou-2 and the node module (节点舱). It is difficult to maneuver the robotic arm's attaching head to reach the port. So Tianzhou-3 tilts the port to radial direction.



by78
General
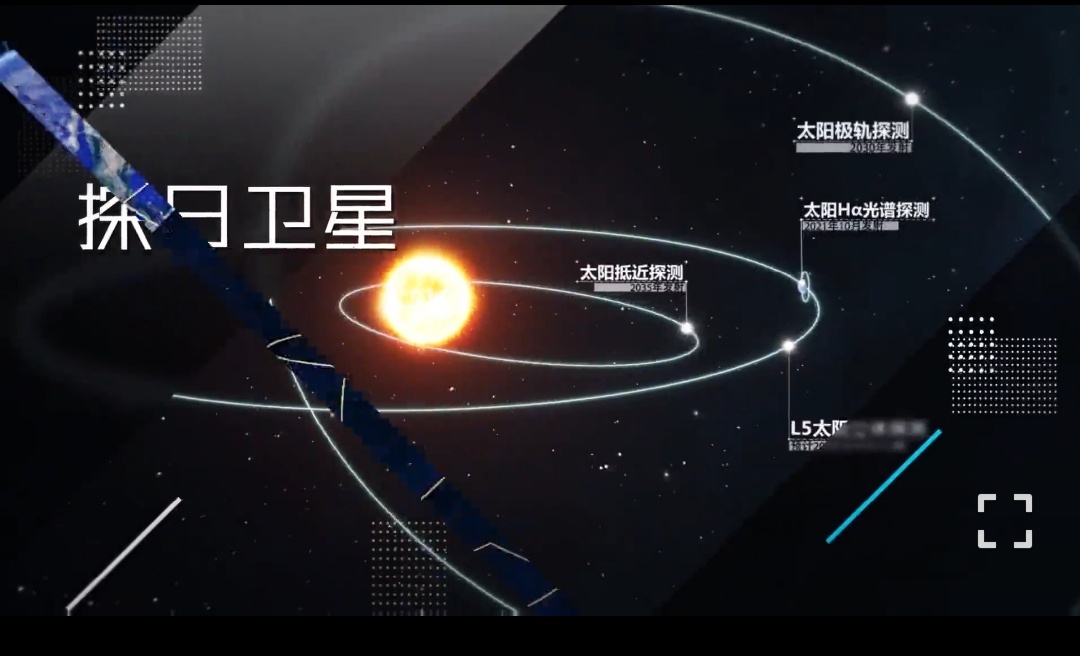
This information is gleaned from a promo video by the 8th Academy of CASC at Zhuhai Airshow. China plans to launch four solar observation satellites. The first one, a probe, will be launched in October of 2021. The next three will be launched in 2025, 2030, 2035, respectively.



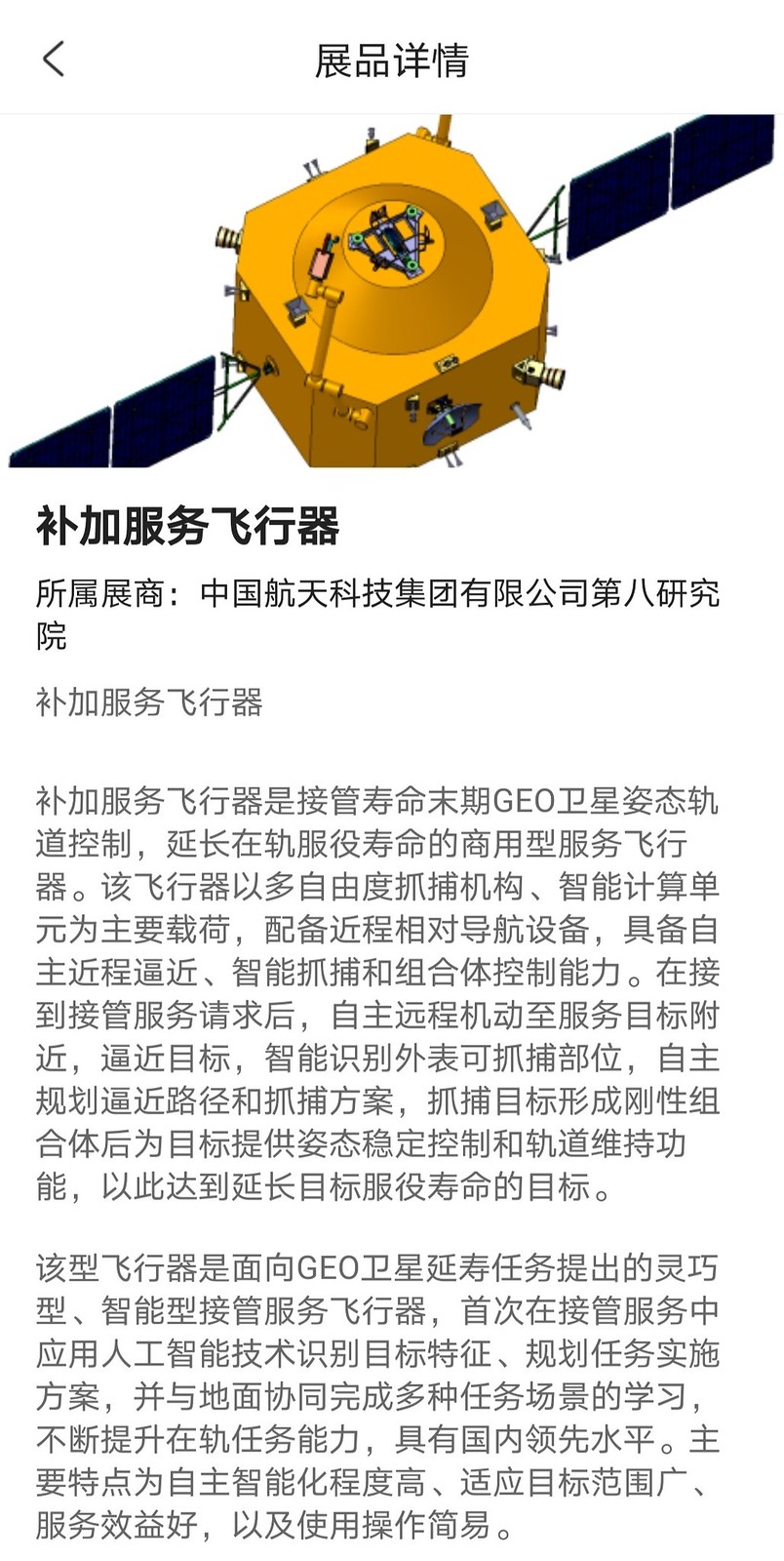
Smart move which makes the various satellites last longer and without the tremendous costs to loft another replacement.More details on that "service spacecraft" concept by the 8th academy of CASC. I'm not sure how far along this project is. It's basically a refueler for satellites. It performs a soft capture of a satellite and then tops up its propellant tanks.





- Status
- Not open for further replies.