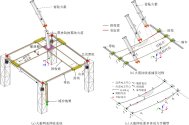
The cable-catching method is less demanding on precise engine gimbaling because the X and Y cables can move under the approaching rocket to form a flexible square grid which creates a very wide capture zone, as long as the rocket's hooks land anywhere within that grid, the system can snare it. You don't need bullseye alignment because the hooks just need to straddle a section of the grid so this method has a meter-level tolerance. Cables are also tension-controlled so they can yield upon impact to further compensate for leftover lateral velocity.
So, my understanding is that the rocket cable catching is meant to occur like this, ideally (highly simplified);

My question, is what happens if the rocket is rotated on its vertical axis slightly, such as this:

Now, I'm sure that they can still catch the rocket that way, but I've always wondered whether the rockets flight path would be configured in a manner to allow it to be caught in the first ideal position rather than the latter, and also whether the latter would present any additional stressors to the rocket airframe versus the former.